Control Systems : From Theory to Self-Leveling Project
₹2,500.00
Course Overview
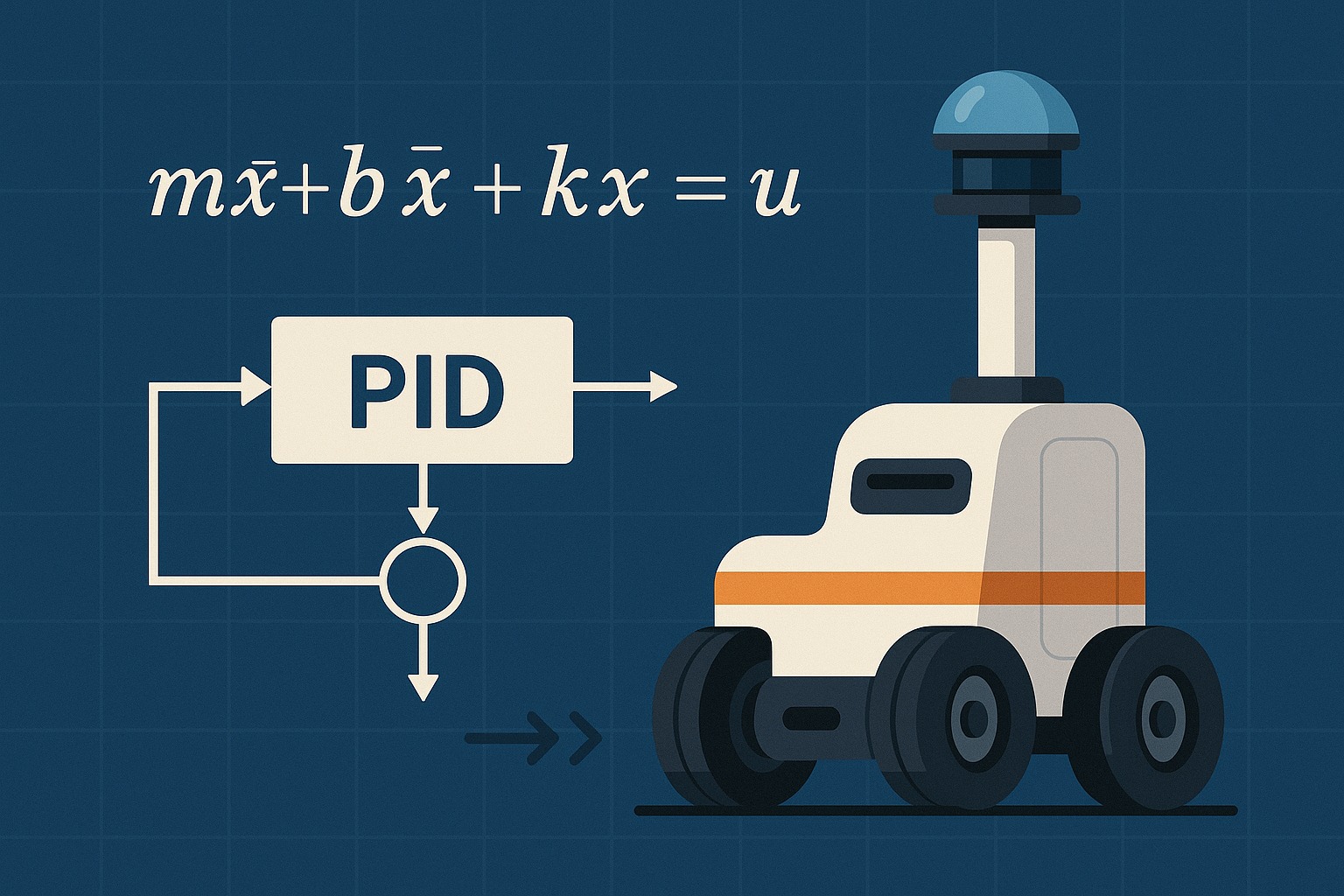
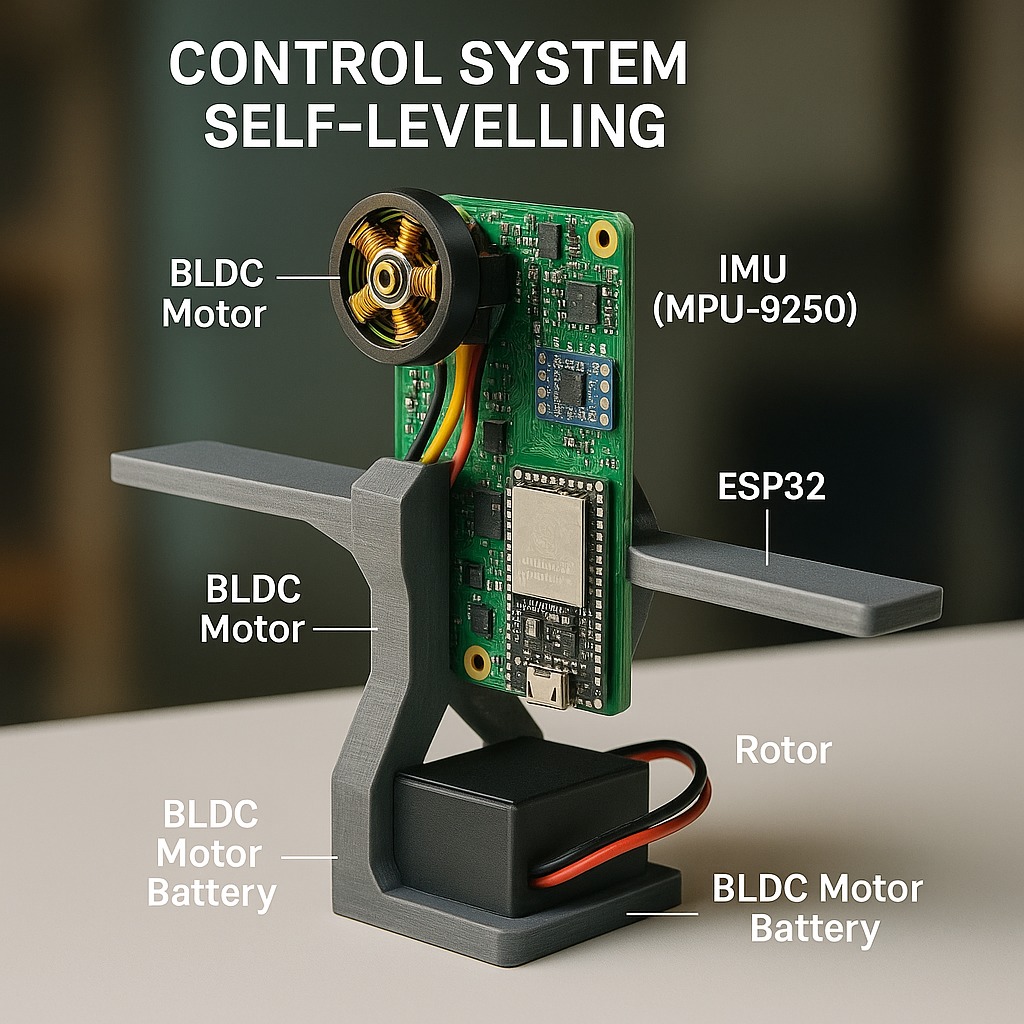
This course offers a hands-on journey through control system fundamentals, from theoretical concepts like transfer functions and PID control to real-time implementation using Python, MATLAB, and embedded systems. Students will learn to model, simulate, and stabilize dynamic systems. The course culminates in building a self-leveling platform using ESP32, a BLDC motor, and an IMU sensor—bridging theory with a practical, working prototype.
Description
Course Structure
Module 1: Introduction to Control Systems
Topics Covered:
-
What is a Control System?
-
Open-Loop vs. Closed-Loop Systems
-
Applications: Drones, Gimbals, Balancing Bots, Satellite Attitude Control
-
Overview of Self-Leveling Platform Project
Activities:
-
Identify Real-World Control Systems (Open vs. Closed Loop)
-
Simulate a Basic Open-Loop System in Python using Matplotlib
Module 2: Transfer Functions and System Dynamics
Topics Covered:
-
Differential Equations for Physical Systems
-
Transfer Functions: Definition and Derivation
-
First- and Second-Order Systems
-
Time vs. Frequency Domain Analysis
-
Poles, Zeros, and System Stability
Activities:
-
Plot Step Response using Python (SciPy) and MATLAB
-
Damped Second-Order System Analysis and Tuning
Module 3: ESP32 and Hardware Introduction
Topics Covered:
-
ESP32 Overview: GPIO, PWM, ADC, Communication Interfaces
-
BLDC Motor, ESC, and Power Setup
-
Frame Design, Rotor Assembly, and Battery Configuration
Hands-on Tasks:
-
Blink an LED using Arduino IDE
-
Wire ESC + BLDC Motor with Proper Safety
-
Perform a Dry-Run Test: Spin the Motor with Test PWM
Module 4: GPIO, PWM, and Motor Control
Topics Covered:
-
PWM Generation on ESP32
-
ESC Calibration and Safety Practices
-
Motor Speed Control using PWM
-
Resolution, Deadband, and Latency Considerations
Hands-on Tasks:
-
Control BLDC Motor using PWM
-
Sweep Motor Speeds and Analyze Behavior
-
Tune Safe and Responsive Operating Range
Module 5: Sensor Integration with MPU-9250
Topics Covered:
-
MPU-9250: Accelerometer, Gyroscope, Magnetometer
-
Sensor Fusion: Complementary vs. Madgwick Filter
-
I2C Communication Protocol
-
Noise Filtering and Real-World Data Handling
Hands-on Tasks:
-
Interface MPU-9250 with ESP32
-
Read Pitch, Roll, and Yaw Angles
-
Implement Complementary Filter for Angle Stabilization
-
Visualize Orientation using Serial Plotter or Processing 3
Module 6: Feedback Control and PID Basics
Topics Covered:
-
Control Loop Architecture: Sensor → Controller → Actuator
-
PID Control: Concepts of Kp, Ki, Kd
-
System Performance: Overshoot, Stability, Settling Time, Steady-State Error
Simulation Activities:
-
Simulate PID-Based Angle Stabilization using Python/MATLAB
-
Visualize and Tune Control Response with Matplotlib
-
Analyze Effects of PID Gains
Module 7: Real-Time PID on ESP32
Topics Covered:
-
Translating PID Logic to Arduino C++
-
Sampling Rate and Loop Timing Optimization
-
Handling Real-World Sensor Noise and Latency
-
Motor Response Testing and Calibration
Hands-on Tasks:
-
Implement PID Control Loop on ESP32
-
Use MPU-9250 Feedback to Stabilize Platform Pitch
-
Tune PID Gains in Real-Time for Stability and Responsiveness
Module 8: Final Project – Self-Leveling Platform
Project Overview:
Build a Single-Axis Self-Leveling Platform using ESP32, MPU-9250, and a BLDC Motor. The platform will detect tilt and auto-correct using a PID-controlled actuator.
Hardware Requirements:
-
ESP32 Development Board
-
BLDC Motor + ESC
-
MPU-9250 IMU
-
Rotor/Actuation System
-
LiPo Battery
-
3D-Printed Tilt Platform
Deliverables:
-
Functional Self-Leveling Prototype
-
Documentation of PID Tuning and System Behavior
-
Optional Add-ons:
-
Dual-Axis Stabilization
-
Web-Based PID Monitor/Control Interface
-
Learning Outcomes
By the end of this course, participants will:
-
Grasp Fundamental Concepts in Control Systems
-
Simulate Dynamic Systems and Controllers in Python & MATLAB
-
Interface Sensors and Actuators with ESP32
-
Build and Tune a Functional Feedback Control System
-
Deploy Real-Time PID Control on Embedded Hardware
Tools & Software Used
| Tool / Software | Purpose |
|---|---|
| Arduino IDE | ESP32 Programming |
| Python (NumPy, SciPy) | Simulation and Plotting |
| MATLAB + Control Toolbox | System Analysis and Visualization |
| Fusion 360 / TinkerCAD | Mechanical Design |
| Processing 3 | Real-Time 3D Visualization (Optional) |


Reviews
There are no reviews yet.