
LUNA Mobile Robot Kit
₹7,499.00
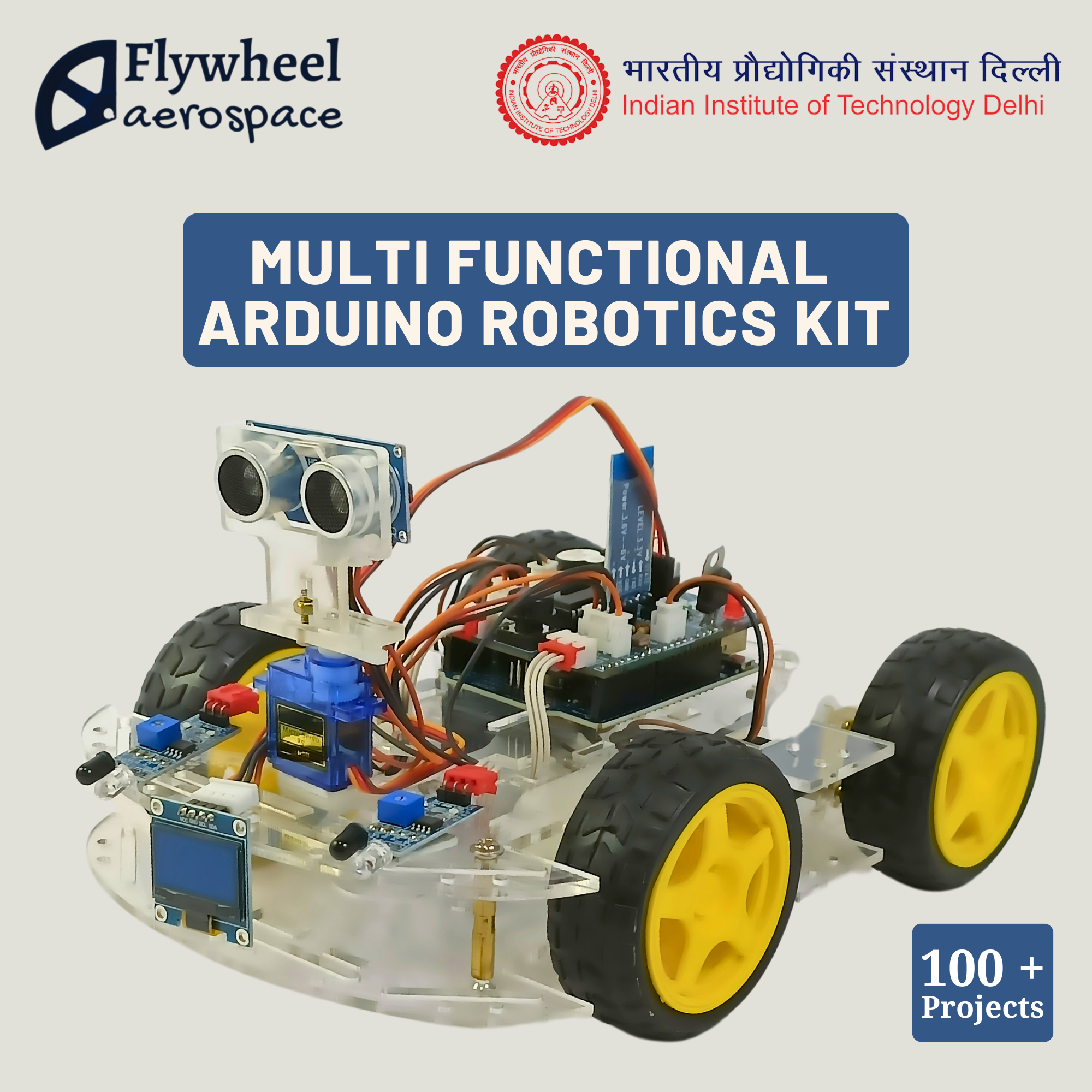
Learn the fundamentals of mobile robotics with Luna, our ESP32-powered differential drive robot platform. Gain hands-on experience with sensors, control algorithms, and embedded robotics while building projects such as line following robots, obstacle avoidance robots, wall-following robots, autonomous navigation systems, and real-time sensor monitoring applications using micro-ROS. Luna allows you to explore concepts like robot kinematics, PID control, sensor fusion, and autonomous decision-making while working with real hardware including encoders, IMU, and ToF sensors.
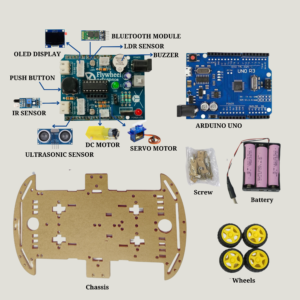
What’s in the box?
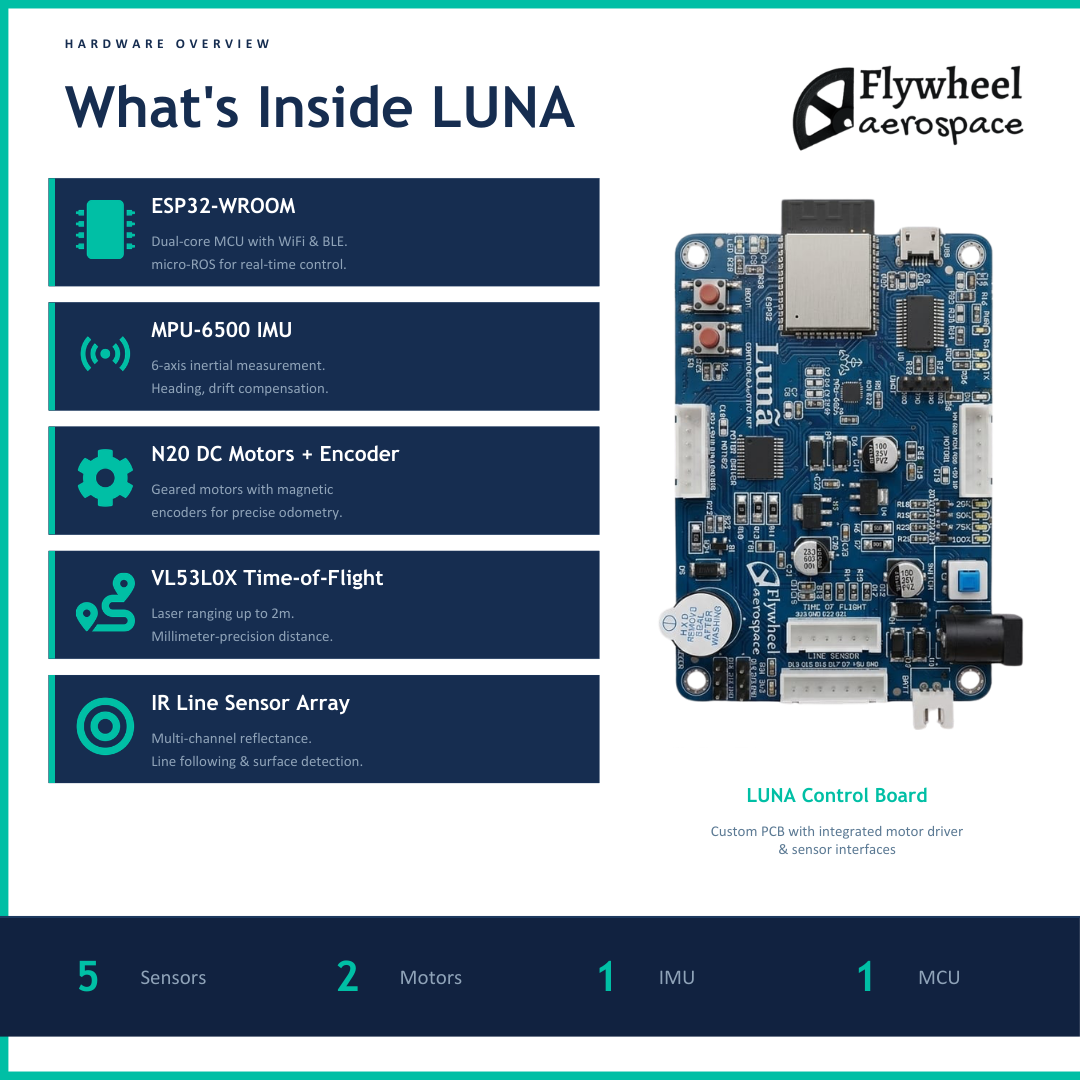
ESP32 MCU * 1
LED * 1
Buzzer * 1
IMU 6050 *1
Time of Flight Sensor (TOF) *1
Line Sensor * 1
N20 DC Metallic Geared Motor with Encoder * 2
Motor Driver * 1
Acrylic Chassis * 1
Nuts and Bolts
Caster Wheel *1
Wheels * 2
Battery 18650 (chargeable) *3
Battery Holder * 1
Cables
Kit User Manual (Digital)
Battery Charger * 1
Description
Projects
| # | Level | Project Name | Algorithm / Core Method Used |
|---|---|---|---|
| 1 | Beginner | Closed-Loop Motor Speed Controller | PID Control |
| 2 | Beginner | Straight-Line Stabilization Robot | Heading PID (IMU-based correction) |
| 3 | Beginner | Precision Angle Rotation Bot | Angular Position PID |
| 4 | Beginner | Line Following Robot | PID Steering Control |
| 5 | Beginner | Obstacle Detection & Auto-Stop Bot | Threshold-Based Reactive Control |
| 6 | Beginner | Encoder-Based Odometry Tracker | Differential Drive Kinematics |
| 7 | Beginner | Smart Wall Follower | Proportional Distance Control |
| 8 | Intermediate | Drift-Compensated Orientation System | Complementary Filter |
| 9 | Intermediate | Kalman-Based Speed Estimator | 1D Kalman Filter |
| 10 | Intermediate | Sensor-Fusion Pose Estimator | Extended Kalman Filter (EKF) |
| 11 | Intermediate | Reactive Obstacle Avoidance Robot | Finite State Machine (FSM) |
| 12 | Intermediate | Corridor Navigation Robot | Distance + Heading Control Fusion |
| 13 | Intermediate | Trajectory Tracking Robot | Nonlinear Kinematic Controller |
| 14 | Advanced | Occupancy Grid Mapping System | Probabilistic Grid Mapping |
| 15 | Advanced | Autonomous Goal Navigation | A* Path Planning |
| 16 | Advanced | Smooth Path Execution Robot | Path Interpolation + Tracking Control |
| 17 | Advanced | Model Predictive Control Robot | Model Predictive Control (MPC) |
| 18 | Advanced | Adaptive Speed Controller | Model Reference Adaptive Control (MRAC) |
| 19 | Advanced | Reinforcement Learning Navigation | Q-Learning |
| 20 | Advanced | Leader–Follower Multi-Robot System | Consensus / Formation Control |



Reviews
There are no reviews yet.